Introduction
Way back in 2004 we visited Navteq at their Boreham Wood office in the UK to see how they created maps (click here for the article). Things have changed quite a bit in the three years since so we went back to the new Watford office to see how the technology has improved.
We spent the day with the survey team in one of the latest techno survey cars and learnt how the maps are created and updated. Whereas previously the main equipment in the car was a laptop computer and a small display screen, now the whole car is jammed packed with technology, there was barely enough room for us to get in and film. |
Article by Mike Barrett

|
The Navteq Survey Car
From the outside the Navteq survey car looks like a pretty regular Renault with a luggage box on the roof... However once the lid of the luggage box is removed and stowed on the back seat the car suddenly takes on the looks of a Dalek from Dr Who.
What has been revealed is the Industrial GPS antenna and a perspex dome. Inside the dome is an array of cameras, these are video cameras that constantly capture images as the survey car is in motion.
Driving around town certainly grabs people's attention. |
 |
The dome actually houses six cameras: 3 to the front, one on each side, and one covering the view over the right shoulder (or left in Europe). Together these cameras cover just about all of the road, pavement, and side roads as the survey car is traveling.
The data recorded from the cameras is integrated with the GPS signal and each frame of video is geo-referenced. this means that if there is any dispute about map data then the images can be reviewed to determine the precise state at the time it was surveyed. Of course if the road is changed after the survey... |
|
The main instrument for the survey is of course a GPS. As this is the critical system for the mapping it obviously needs to be of industrial strength. The antenna is a massive Trimble system. This is OK for above ground where you can get a good position fix, but what about mapping tunnels? Well this is where the GPS is backed up by gyros and motion sensors.
This car knows where it is within a couple of metres whether it is on the open road or underground. The accuracy of the GPS is such that the car trail is split either side of the centre line of the road. |
 |
Moving inside the survey car we find that the single laptop has been replaced by some serious computing power with some awesome storage capabilities. The car has its own battery and power inverter to run the equipment, and if that is not enough there is a power lead (green cable) which plugs into a socket in the bumper that can be connected to the mains.
On the left there is a regulator and fuse box to ensure that all the equipment gets power safely, then the GPS receiver (yellow box) then the camera processor, and finally the power inverter. |
 |
Sited on the shelf is the disk array. This houses four 750Gb hard drives. Each day's surveying data is about 700Gb so with the 750Gb drive in the PC there is enough space to be on the road for a whole week without downloading to the office.
Round the back of the Disk array is the PC and control centre. There is even a network and a docking station for a laptop. There is a wireless connection for the keyboard and mouse. Now I thought I had my car kitted out with equipment this is something else... |
 |
All this equipment is controlled by a simple keyboard, trackball, and touch screen display. There is also a microphone suspended from the roof to allow the surveying analyst to describe what he is seeing.
On the road in the Navteq Survey car
Off we went onto the road and witnessed the cameras capturing the features of the roads, the analyst dropping icons, and describing POIs and roads as we were going past/over them. This was all being recorded along with the GPS track as we drove along.
On return to the office the data was downloaded and the processing of the new and modified features could start. |
 |
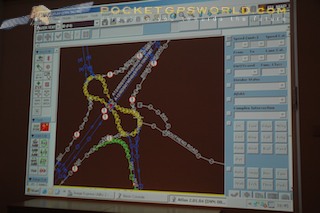
Processing data in the office
Each video image, dropped icon and voice file was geo-referenced with the GPS position. When this is loaded into the system it results in a number of points (POIs?) on a map. These can then be interrogated to determine and confirm features that are in the current database.
The end result of this is the database which is used to generate the map and mapping overlays that are used in the SatNav products that we use in our daily lives. The Navteq database contains much more data than the SatNav devices use, but as the SatNav devices become more powerful they are capable of benefiting from the extra data in the database. |
 |
Watch the Navteq Mapping on video.
It is actually quite difficult to describe this process in words, it is much easier to understand by watching it. Whilst we were out we recorded a video of the day, which we have edited down to 11 minutes to give you an idea of a day in the life of a Navteq Survey Analyst. Click here for a Windows media version of the video or Click here for a QuickTime version (for Mac).

|